ZLTECH 24V-36V 5A DC עלעקטריק מאָדבוס רס485 ברושלעסס מאָטאָר שאָפער קאָנטראָללער פֿאַר AGV


















פונקציע און נוצן
1 ספּיד אַדזשאַסטמאַנט מאָדע
פונדרויסנדיק אַרייַנשרייַב גיכקייַט רעגולירן: פאַרבינדן 2 פאַרפעסטיקט טערמינאַלס פון די פונדרויסנדיק פּאָטענטיאָמעטער צו די GND פּאָרט און די +5 וו פּאָרט פון די שאָפער ריספּעקטיוולי.פאַרבינדן די אַדזשאַסטמאַנט סוף צו SV סוף צו נוצן די פונדרויסנדיק פּאָטענטיאָמעטער (10K ~ 50K) צו סטרויערן גיכקייַט, אָדער דורך אנדערע קאָנטראָל וניץ (אַזאַ ווי פּלק, איין-שפּאָן מיקראָקאָמפּוטער, און אַזוי אויף) אַרייַנשרייַב אַנאַלאָג וואָולטידזש צו SV סוף צו פאַרשטיין גיכקייַט רעגולירן (רעכענונג צו GND).די אַקסעפּטאַנס וואָולטידזש קייט פון די SV פּאָרט איז DC OV צו +5V, און די קאָראַספּאַנדינג מאָטאָר גיכקייַט איז 0 צו רייטאַד גיכקייַט.
2 מאָטאָר לויפן / האַלטן קאָנטראָל (ען)
די מאָטאָר ס פליסנדיק און סטאָפּפּינג קען זיין קאַנטראָולד דורך קאַנטראָולינג די אָנ און אַוועק פון די וואָקזאַל EN קאָרעוו צו GND.ווען דער וואָקזאַל איז קאַנדאַקטיוו, דער מאָטאָר וועט לויפן;אַנדערש דער מאָטאָר וועט האַלטן.ווען ניצן די לויפן / האַלטן וואָקזאַל צו האַלטן מאָטאָר, דער מאָטאָר וועט האַלטן געוויינטלעך, און זיין באַוועגונג געזעץ איז שייך צו די ינערשאַ פון די מאַסע.
3 מאָטאָר פאָרויס / פאַרקערט פליסנדיק קאָנטראָל (F/R)
די מאָטאָר ס פליסנדיק ריכטונג קען זיין קאַנטראָולד דורך קאַנטראָולינג די אויף / אַוועק פון וואָקזאַל F / R און וואָקזאַל GND.ווען F/R און וואָקזאַל GND זענען נישט קאַנדאַקטיוו, דער מאָטאָר וועט לויפן קלאַקווייז (פון די מאָטאָר שטיל זייַט), אַנדערש דער מאָטאָר וועט לויפן קאַונטערקלאָקווייז.
4 דרייווער דורכפאַל
ווען אָווערוואָלטאַגע אָדער אָוווערקראַנט אַקערז ין דער שאָפער, דער שאָפער וועט אַרייַן די שוץ שטאַט און אויטאָמאַטיש האַלטן ארבעטן, דער מאָטאָר וועט האַלטן, און די בלוי ליכט אויף די שאָפער וועט גיין אַוועק.דער שאָפער וועט מעלדונג די שרעק ווען די געבן וואָקזאַל איז באַשטעטיק (ד"ה, EN איז דיסקאַנעקטיד פון GND) אָדער די מאַכט איז אויסגעדרייט אַוועק.ווען דעם שולד אַקערז, ביטע טשעק די וויירינג קשר מיט מאָטאָר אָדער מאָטאָר מאַסע.
5 רס485 קאָמוניקאַציע פּאָרט
דער שאָפער קאָמוניקאַציע מאָדע אַדאַפּץ נאָרמאַל מאָדבוס פּראָטאָקאָל, וואָס קאַנפאָרמז צו די נאציאנאלע נאָרמאַל GB/T 19582.1-2008.מיט RS485-באזירט 2-דראָט סיריאַל פֿאַרבינדונג קאָמוניקאַציע, די גשמיות צובינד ניצט אַ קאַנווענשאַנאַל 3-שפּילקע וויירינג פּאָרט (A +, GND, B-), און די סיריאַל פֿאַרבינדונג איז זייער באַקוועם.
פּאַראַמעטערס
| דרייווער | ZLDBL4005S |
| אַרייַנשרייַב וואָולטידזש (V) | 24V-36V DC |
| רעזולטאַט קראַנט (א) | 5 |
| קאָנטראָל אופֿן | מאָדבוס רס485 |
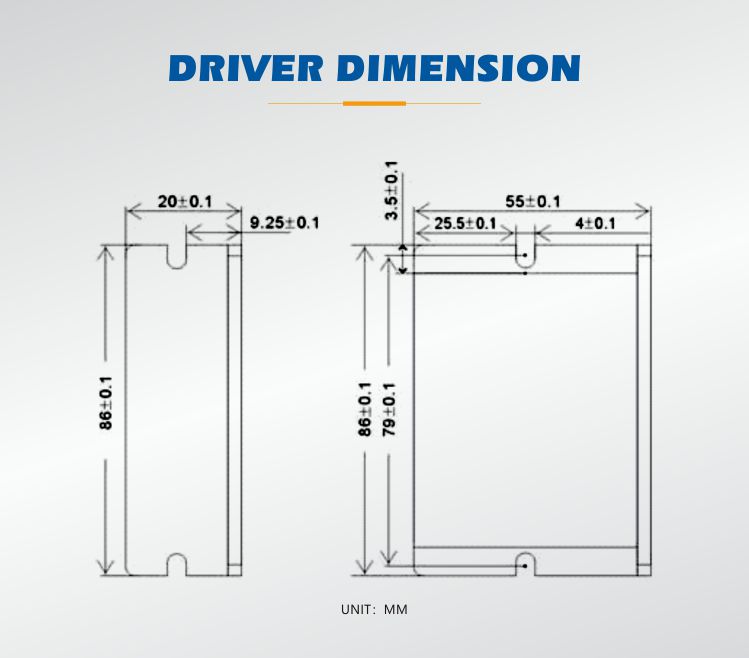
| גרייס (מם) | 86 * 55 * 20 מם |
| וואָג (קג) | 0.1 |
ויסמעסטונג
אַפּפּליקאַטיאָן

פּאַקינג

פּראָדוקציע און דורכקוק מיטל

קוואַליפיקאַציע & Certification

אָפיס & פאַבריק

קאָאָפּעראַטיאָן

פּראָדוקטן קאַטעגאָריעס
-

2S86 ZLTECH 86 סעריע DC 36V 48V AC 27V-75V Clo...
-

ZLTECH 24V-48V 30A קאַנבוס מאָדבוס צווייענדיק קאַנאַל די ...
-

ZLTECH 15 אינטש 200 קג דק ברושלעסס כאַב מאָטאָר מיט ...
-

ZLTECH Nema17 0.5/0.7Nm 18V-36V ינאַגרייטיד שריט ...
-

ZLAC8030L ZLTECH 20V-60V 60A CANOPEN RS485 DC s...
-

ZLTECH 57mm Nema23 ינאַגרייטיד שריט מאָטאָר מיט די ...





